Stepper motor is an electromechanical device that directly converts electrical pulses into mechanical motion. By controlling the sequence, frequency and quantity of electrical pulses applied to the motor coil, the steering, speed and rotation angle of stepper motor can be controlled. Without the help of the closed-loop feedback control system with position induction, the accurate position and speed control can be realized by using the simple and low-cost open-loop control system composed of stepping motor and its supporting driver.
Characteristics of stepping motor
Precise position control determines the rotation angle of the shaft according to the number of input pulses. The position error is very small (less than 1 / 10 degree) and does not accumulate.
Accurate speed the speed of the stepping motor depends on the frequency of the input electric pulse, which can realize accurate control and convenient adjustment. Therefore, it is widely used in various motion control fields.
Forward / reverse rotation, emergency stop and locking functions can effectively control the motor torque and position within the whole speed range, including static torque. When the motor is locked (there is current in the motor winding and there is no external pulse command input for rotation), a certain torque output is still maintained.
Precise position control under low speed conditions the stepping motor can run smoothly at very low speed without the help of gearbox adjustment, and output large torque, avoiding power loss and angular position deviation, reducing cost and saving space.
Longer service life the brushless design of the stepping motor ensures a long service life of the motor. The life of stepping motor usually depends on the bearing.
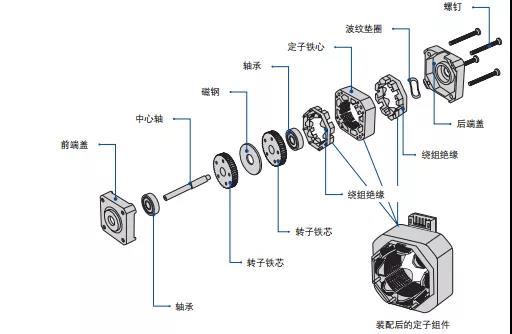
Basic structure and working principle
Basic structure:
Step motor - step motor technology and application the stepper motor driver controls the winding of the stepper motor to be energized forward or reverse in a certain sequence according to the external control pulse and direction signal through its internal logic circuit, so as to make the motor rotate forward / reverse or lock.
Take the 1.8 degree two-phase stepping motor as an example: when the two-phase windings are energized, the motor output shaft will be stationary and locked. The maximum torque to keep the motor locked at rated current is the holding torque. If the current of one phase winding changes direction, the motor will rotate one step (1.8 degrees) in a given direction.
Similarly, if the current of another winding changes direction, the motor will rotate one step (1.8 degrees) in the opposite direction to the former. When the current passing through the coil winding changes to excitation in sequence, the motor will realize continuous rotation step along the established direction, and the operation accuracy is very high. For 1.8 degree two-phase stepping motor, 200 steps are required to rotate one cycle.
Two phase stepping motor has two winding forms: bipolar and unipolar. There is only one winding coil on each phase of bipolar motor. When the motor rotates continuously, the current should be changed to excitation in the same coil in turn. In the design of driving circuit, eight electronic switches are required for sequential switching.
Unipolar motor has two winding coils with opposite polarity on each phase. When the motor rotates continuously, it only needs to energize and excite the two winding coils on the same phase alternately. Only four electronic switches are needed in the design of the driving circuit. In the bipolar drive mode, because the winding coil of each phase is 100% excited, the output torque of the motor in the bipolar drive mode is about 40% higher than that in the unipolar drive mode.